一、步进电机中产生的同步力矩无法使转子速度跟随定子磁场的旋转速度,从而引起失 步。失步产生的主要原因及解决方法: ①步进电机的转矩不足,拖动能力不够,当驱动脉冲频率达到某临界值开始失步。由于步进电机的动态输出转矩随着连续运行频率的上升而降低,因而凡是比该频率高的工作频率都将产生失步。 有3种解决方法:可使步进电机产生的电磁转矩增大,为此可在额定电流范围内适当加大驱动电流;在高频范围转矩不足时,适当提高驱动电路的驱动电压;改用转矩大的步进电动机等,也可使步进电机需要克服的转矩减小,为此可适当降低电机运行频率,以便提高电机的输出转矩。 ②步进电机起动失步。由于步进电机自身及所带负载存在惯性,当加速时间过短时会出现这一现象。应该设置合理的加速时间,使电机从低速度平稳上升到某个速度。 ③步进电机产生共振也是引起失步的一个原因。步进电机处于连续运行状态时,如果控制脉冲的频率等于步进电机的固有频率,将产生共振。在一个控制脉冲周期内,振动尚未得到充分衰减,下一个脉冲就已来到,因而在共振频率附近动态误差****并导致步进电机失步。解决方法:减小步进电机的驱动电流;采用细分驱动方法和阻尼方法。
产品推荐:

ZD-2HD430为我公司****开发,该驱动器我公司设计师是用TB6600芯片所设计的一种步进驱动器,该驱动器继承了芯片的功能和特点,具有高集成度,高可靠性;接口采用超高速光耦 隔离,抗高频干扰能力强;内置混合式衰减模式;双全桥 MOSFET 驱动,低导通电阻 Ron = 0.53Ω(内阻越小,发热量越小,电流导通性越好);高耐压32VDC,大电流 3A(峰值);电流设置可0―3A 随意调节;多种细分可选(1、1/2、1/4、1/8、1/16);自动半流锁定功能;内置温度保护及过流保护。
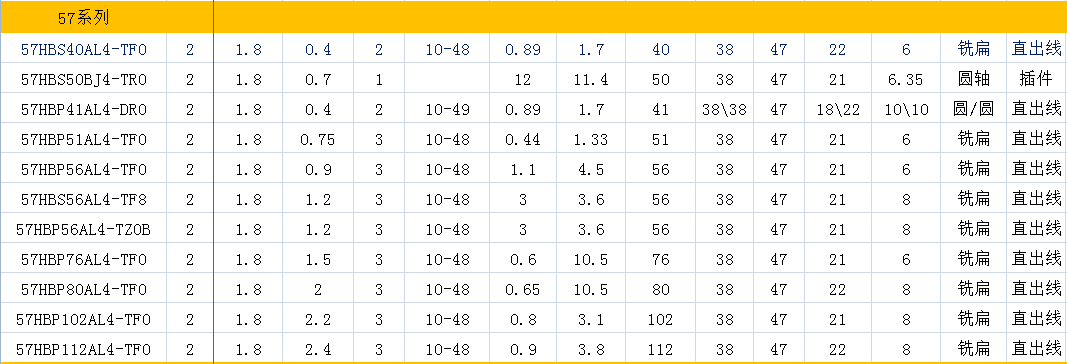
适配电机: 
联系人:李先生 电话:18010107283 QQ号码:2223199877 |


