首先要明确工业机器人关节的工况:
一、需要撑住后端机构由于重力产生的扭矩, 二、 关节转速不高。 那么使用减速机的原因有两点,第一提扭矩、第二提控制分辨率。 打个比方,一个50:1的谐波减速机就能轻松将一个额定100mNm的电机的额定扭矩提升到5Nm,代价是: 1. 转子转速比直驱高49倍――本来工业机器人的关节转速就不高一般都是每秒一两转,额定100mNm的电机轻松跑6k转/min,白不转那么快。要是嫌转的不够快? 好说,提电压呗,只要轴承和转子撑得住。 2.维持相同扭矩时,发热功率是不加减速机的1/2500. 其实不是说额定100mNm的电机干不到5Nm,往死里提电流就好了,就是电机会比较烫撑不了几秒就得冒烟就算上了水冷电费也会比较多... 要想达到相同扭矩又不想太烫就得换 扭矩/发热 效率高且热阻小热容量大的电机。
产品推荐:
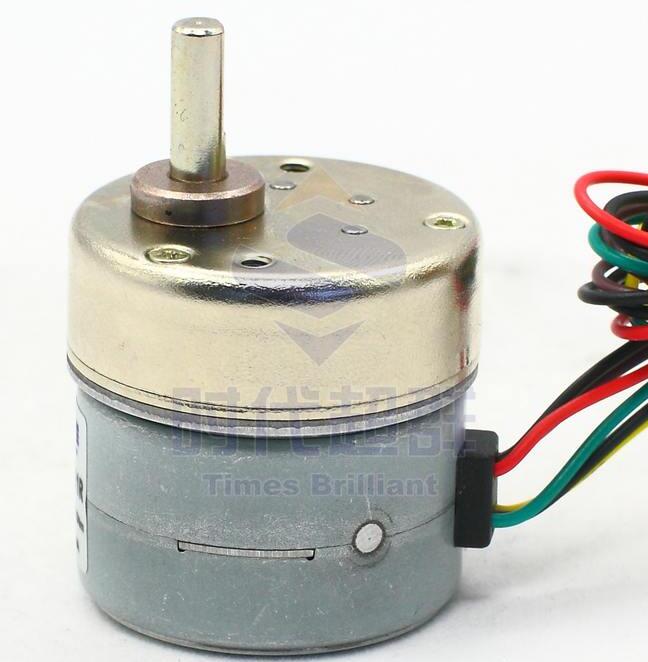
我公司市场上的35系列齿轮减速步进电机具有以下一些: 
举例:35YF22GN030R-TF0为0.4Nm的减速步进电机它使用12V直流电源,经过1:30的减速后,力矩大、转速平稳、噪音小,是控制用电机换代的理想选择。
联系人:李先生 电话:18010107283 QQ号码:2223199877
|


